
Impressionen vom Bau: Ferngesteuerter Roboter auf seinem Fahrrad
Hugo hat schon einige Einsätze hinter sich. Dieser kleine ferngesteuerte Roboter sorgt bei Groß und Klein für viel Freude. Wenn du dich für Technik interessierst, willst du natürlich wissen, wie Hugo gebaut wurde. Deswegen sollst du heute einen Einblick hinter die Kulissen bekommen.
Ich musste viele Dinge lernen, denn eine animatronische Puppe zu kreieren, fordert Fähigkeiten in verschiedenen Bereichen, die mich vorher noch nie berührt hatten. Einige Fachgebiete waren (sind) so neu und komplex, dass ich mir Hilfe von Freunde und vor allem von meinem Bruderherz Florian geholt habe. Vielen Dank an dieser Stelle an alle Beteiligten.
Hier ist ein Interview aus dem Fab Lab Berlin in dem ich etwas über die Entwicklung von Hugo erzähle:
Die Idee
Die Idee eines Characters, der auf einem Dreirad fährt, ist nicht neu. Es gibt bereits Puppen wie den sympathischen Elefanten „Jochen“ aus Weimar oder einen Affen von einem Künstler aus Frankreich. Spätestens mit dem Film „Saw“ kennen viele das Männchen, dass auf einem Dreirad daher gefahren kommt.
Da ich Roboter Walkacts spiele, sollte der Charakter auf dem Dreirad unbedingt ein ferngesteuerter Roboter sein. Viele Roboter aus Filmen sind mir als Walking Act zu martialisch oder haben eine bedrohliche Komponente. Ich wollte auf jeden Fall einen Charakter entwickeln, der auf den ersten Blick sympathisch ist.
Deswegen spendierte ich Hugo große „Disney Augen“. Hugo sollte eine Geschichte haben. Er kommt aus der Vergangenheit und sieht deswegen Retro aus. Augen und Mund sollten pixelig sein oder zumindest nicht so perfekt sein, wie man es heute mit Bildschirmdisplays hinbekommen würde.
Im Bauch findet man ein Floppy Diskettenlaufwerk und auch sonst erinnert er an Spielzeug- und Serviceroboter aus den 80gern wie den Omnibot.
Aber genug der Vorrede. Hier kommen die Impressionen vom Bau:
Das Fahrrad
Das Fahrrad ist die erste große Komponente. Als erstes wollte ich es fernsteuern können und dann die Puppe „bloß noch raufsetzen“. So die Idee. Wir bauten einen Dummy, damit wir die Proportionen testen konnten.

Dummy zum Test der Proportionen
Der Antrieb
Als Antrieb dient ein Scheibenwischermotor. Er hat genug Power und kann auf ebener Strecke das von Gewicht ca. 50 kg bewegen. Die Kraft musste auf die Hinterachse übertragen werden. Dafür haben wir 3 verschiedene Systeme ausprobiert die nicht funktionierten. Letztendlich haben wir ein zweites Zahnrad montiert, dass direkt über eine Kette mit dem Motor verbunden ist.
Die Steuerung
Nach links und rechts lenken klingt einfach ist aber technisch schwierig umzusetzen, wenn man mehr Gewicht bewegen muss. Wir versuchten es mit starken Modellbau Servos, die bis zu 30 kg drücken können. Die sind zwar super schnell und präzise aber die falsche Wahl für so ein Projekt und sehr anfällig.
Der zweite Ansatz war ein Motor, der die Sitzhöhe verstellt. Der hat die nötige Kraft ist aber recht langsam.
Letztendlich haben wir uns für einen linearen Aktuator entschieden, der normalerweise schwere Türen elektronisch öffnet und schließt.
Das Design
Das Dreirad, dass ich für das Projekt gekauft habe, sollte als Grundgerüst dienen. Die Technik wird in einer Kiste hinter dem Sitz verstaut. Bei der Verkleidung für die Räder habe ich mich nach verschiedenen Tests für die „Retro Variante“ entschieden.
Der Aktuator wurde in die Mittelstrebe verbaut. Dafür haben wir die Originalstange herausgenommen und durch ein Stahlprofil ersetzt. Florian hat eine schöne Abdeckung gebaut.
Für die Kotflügel hat er Positive erstellt, abgeformt und mit Glasfaser und Epoxidharz zwei wunderschöne Radkästen gebaut. Eine langwierige Arbeit mit mehreren Anläufen.

Stahlprofil für die Mittelstange

Abdeckung für den liniearen Aktuator

Vorbereitung der Mittelstange

Feinschliff

Der erster Entwurf der Kotflügel wurde verworfen, weil er zu massiv wirkt

Erster Anlauf für die Radkästen

Erstellen eines Positivs des Radabdeckung

Feilen, schmirgeln…

… und nochmals schmirgeln (Danke Florian)

Unterlage für den Abdruck

Abformen der Radkästen

Mit Glasfaser und Harz wird laminiert

Die Doppelhälften werden zusammengesetzt

Mit Montierhilfen

Test am Dreirad

Die Form passt

Die Teile werden grundiert

Endresultat nach dem Lackieren

Lackierte Abdeckung

Lackierte Teile werden montiert

Kiste für Technik

Verkleidung aus MDF

Rückansicht
Der Roboter
Roboter Design
Wie schon am Anfang erwähnt, soll Hugo niedlich und ansprechend wirken. Deswegen hat er große Augen und einen im Verhältnis zum Körper großen Kopf. Alles was für das Kindchen Schema nötig ist. Fast, denn ein bisschen limitiert war ich schon.
Die Holzteile wollte ich mit dem Lasercutter schneiden. Hier im Fab Lab Berlin gab es bis dato „nur“ einen Lasercutter, mit dem man Platten von 600 x 300 mm schneiden kann. Alle Teile mussten sich in diesem Rahmen bewegen.
Die Rundungen haben ich durch „schlitzen“ des Holzes realisiert.
Arme und Beine hatte ich am Anfang als „kleine Kästen“ konstruiert. Das war leider nicht stabil genug. Im dritten Anlauf wurden die Beine massiv gebaut. Mehrere Schichten MDF Platten wurden verklebt.
Die Roboter Mechanik
Hugo kann den Kopf „Rechts / Links“ und „Oben / Unten“ bewegen.
Kopf rechts / links bewegen
Der Kopf liegt auf einem Kugellager von einer großen beweglichen Rolle, wie man sie von einem Einkaufswagen kennt und die man im Baumarkt kaufen kann. Der Servo ist darunter montiert.
Kopf hoch / runter bewegen
Damit der Servomotor nur minimale Kräfte aufbringen muss, haben ich zuerst den Kopf ausgeschnitten und zusammen gesetzt. Danach wurde durch Probieren der Schwerpunkt gesucht. Der Liegt natürlich so hoch wie möglich und hat zur Folge, dass der Hals seitlich gesehen recht dünn ausfällt damit „Kinn“ und „unterer Hinterkopf“ genug Spiel haben.
Animierte LED Augen
Die Augen bestehen aus einer 8×8 LED Matrix, die über einen Microkontroller gesteuert werden. Insgesamt sind es 128 LEDs für die Augen. Hugo hat zehn Animationen, die nach einer bestimmten Gewichtung im Zufallsprinzip ablaufen. Das gibt den Augen die Illusion, dass sie „echt“ sind. Die Animation wirk statisch wenn sie vornherein festgelegt ist und als Film abläuft. Zu Beginn waren auch negative Emotionen mit dabei, die ich wieder entfernt habe. Positive und neutrale Ausrücke der Augen passen am Besten zu einem freundlichen und aufgeschlossenen Puppenspiel.
Animierter LED Mund
Genau wie die Augen besteht auch der Mund aus LEDs. Dafür habe ich drei 8×8 LED Matrizen verwendet.
Hier bediene ich mich einer Technik, die auch bei Zeichentrickfilmen genutzt wird. Wenn man Charaktere beim sprechen animiert, reichen im einfachsten Fall 6 verschiedenen „Mundbilder“. Man nennt es das AF System.
Das System wurde für Zeichentrickfilme in den 1960gern entwickeln.
In Cartoons werden die Mundanimationen auf die Sprache gelegt. Das wäre bei Hugo zu kompliziert. Die Animationsbilder werden nach Soundlautstärke angezeigt. Damit erreicht man eine ausreichend gute Illusion, dass die Mundbewegungen synchron sind.

Mundanimation wie für Zeichentrickfilme nach dem A-F System
Den ferngesteuerten Roboter bedienen
Hugo ist auf die wichtigsten Fähigkeiten, die man manuell bedienen muss, reduziert. Also Vorwärts- und Rückwärtsfahren, nach rechts / links lenken. Kopf nach rechts / links, beziehungsweise Kopf hoch / runter. Der Rest, also Augen und Mund, ist automatisiert. Das hat den Vorteil, dass man ihn leichter spielen kann als andere animatronische Puppen. Man benötigt nur 4 Steuerhebel.
Einsatz
Hugo fährt auf Events, Festivals und Messen. Die nächste Herausforderung ist Hugo Leben einzuhauchen. Ich widme mich jetzt dem dem Puppenspiel, damit Hugo authentisch rüberkommt. Die Art wie man ihn spielt macht viel von seiner Wirkung aus. Deswegen arbeite ich an seinem Repertoire wie „unnützen Wissen“ und an Liedern, die er singt. So bleibt er ein interessanter Gesprächspartner für kleine und große Gäste.

Erster Entwurf mit Outlines

Erster Entwurf Roboter Kopf und Gelenk

Problem der Verkleidung einer Rundung mit Holz

Test der Rundung mit Papier

Lasercutter schneidet MDF Platte

Fertige Teile augelasert

Teile werden aus der Platte entfernt

MDF Plattentest mit Schlitzen

Nahaufnahmen Schlitzung

MDF Schlitzplatte gebogen – mit tollem Ergebnis

Holzdummy 2 zum Test der Proportionen

Test der Proportionen für den Korpus

Korpus mit Blende und Applikationen wie Floppy Diskettenlaufwerk, Schalter, LEDs und LED Display

LED Display wird mit einem Mikrokontroller (Arduino) angesteuert

Prototyp erstes Bein…

… hat den Stresstest leider nicht bestanden.

Neue Arme und Beine verschraubt
Neue Arme und Beine montiert

Komplett zusammengesetzt und Farbtest am Fuß

Die Teile warten auf die Behandlung mit Schleifpapier

Alles schön glatt machen

Mühsam ernährt sich das Eichhörnchen

Gehacktes Babyphone wird als Mirkofon verwendet (Zwei mal geschrottet wegen Verpolung)

Gehacktes Babyphone mit verlängertem Mikrofon und Kopfhörer Klinkenanschluss

Roboter Steuerung mit MDF verkleidet

Bereit zum Lackieren

Schicht eins ist fertig

Roboterkopf mit fertigen Outlines

Teile werden auf das Fahhrad montiert

Bereit für die erste Testfahrt
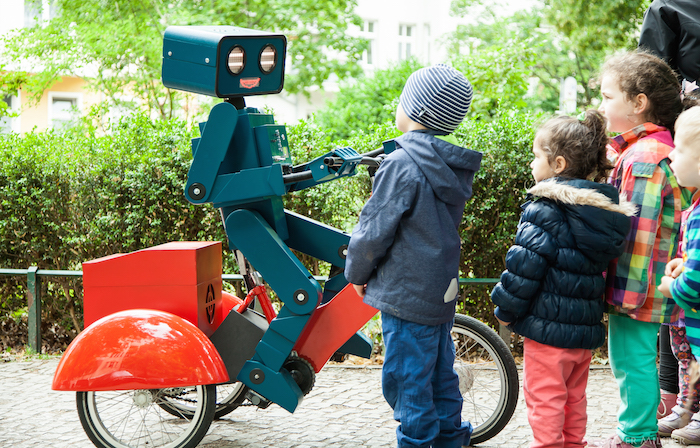
Erste Fahrt auf den Spielplatz
Zusammenfassung
Der Bau von Hugo, dem ferngesteuerten Roboter, war lang und hat etwa 3 Jahre gedauert. Das hängt zum einen damit zusammen, dass ich nicht Vollzeit an dem Projekt gearbeitet habe. Zum anderen mussten verschiedene Konstruktionen durch Probieren und Tüfteln entwickelt werden. Das kostet Zeit. Viele Dinge wie Lasercutten und Löten musste ich lernen. Vor allem muss man sich eingestehen, dass man alles nicht selber machen kann. In vielen Bereichen erzielt man bessere Ergebnisse wenn man Profis ranlässt. Aber Stück für Stück tastet man sich ran und merkt, dass man alles lernen kann – wenn man die Zeit und Energie investiert.